飒沓旨在为用户提供光伏全生命周期机器人化的解决方案。
关注我们

飒沓旨在为用户提供光伏全生命周期机器人化的解决方案。
随着光伏电站规模快速扩张,传统人工巡检与故障后抢修模式已难以满足高效、安全、可量化的运维需求。作为光伏运维解决方案提供商,我们致力于打造“无人值班、少人值守、区域维检”的智能运维闭环,将检测、规划、执行和决策串联起来,实现全生命周期管理。
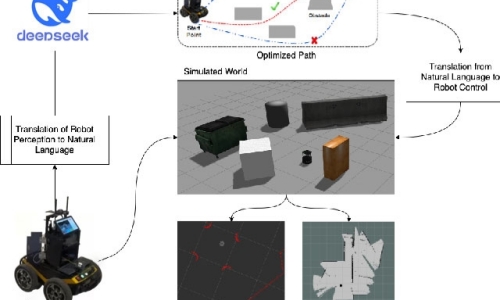
结合切片辅助推理(SAHI)与 YOLOv8,实现光伏组件及小型遮挡物(鸟粪、碎石、立柱等)高精度识别,提升异常检测能力和模型鲁棒性,为机器人巡检提供可靠视觉支持。
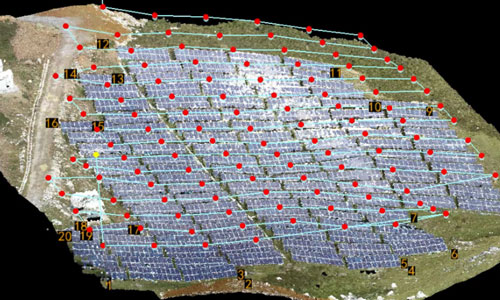
通过阵列边界和可通行区自动提取,结合 A* 启发式搜索生成最优巡检路线,支持动态生成巡检线,实现机器人自主作业路线规划。
在GNSS信号弱或失效场景下,RGB-D 深度相机构建局部栅格地图,实时识别静态与动态障碍物并进行路径重规划,保障巡检机器人安全运行。
统筹建安、运维与拆除工序,云端调度、边端实时感知、人机共融作业,实现可追溯数字化流水线,包括工序管理、日志记录和远程监控。
整合视觉/视频处理、结构化结论输出、可视化界面与大语言模型,实现“影像 → 结论 → 建议”的自动化闭环,加速运维决策效率。
面向割草、清洗、搬运、装板等作业,模块化硬件与车规级控制器结合远程监控和历史日志,实现规模化部署与多场景智能运维。
人工成本高、效率低:视觉智能+路径规划替代重复人工巡检与割草/清洗作业,实现作业节拍稳定、成本可控。
复杂地形、弱GNSS环境:RGB-D 本地感知与视觉重定位确保山地、渔光、滩涂等场景下安全导航与避障。
数据孤岛、决策慢:云-边-端+多模态AI平台将影像、运行日志、诊断结论结构化,为快速决策和长期资产管理提供支持。
问题:场站目标小、遮挡复杂、巡检效率低。
方案:SAHI+YOLOv8小目标检测 + A*全局路径规划 + RGB-D本地避障,实现“自动识别 → 动态生成路线 → 本地避障”。
效果:巡检路线自动化,关键结构实时定位,模型泛化能力显著提升。
问题:人工管理混乱、记录缺失、效率低。
方案:云-边-端架构下机器人并行安装与工序管理,实现阵列安装与维护并行作业、可追溯操作。
效果:安装效率提升,工序数据可追溯,落地与迈步智能合作。
问题:割草、清洗与巡检对人工依赖高、安全风险高。
方案:部署割草机器人、清洗无人机及微阵列巡检机器人,结合云端调度和视觉诊断,实现无人值班、少人值守运维。
效果:运维流程数字化,作业风险显著下降,作业一致性提升。
降本增效:替代高频人工作业,降低人工成本和安全隐患。
运维质量可量化:数据化巡检与结构化结论实现问题早发现、早修复,减少长尾故障。
可扩展产品矩阵:模块化机器人+统一云平台,支持分布式与集中式电站运维复制部署。